Desarrollan Brazo Biónico Inspirado en Pulpos
El movimiento de los tentáculos de los pulpos inspiró a un equipo de investigadores que desarrollaron un brazo biónico capaz de replicar los movimientos de estos animales.
El equipo detrás de este brazo robótico se compone por Zhexin Xie, Feiyang Yuan, Lufeng Tian, Bohan Chen, Zhongquiang Fu, Sizhe Mao, Tongtong Jin, Yun Wang, Xia He, Gang Wang, Yanru Mo, Xilun Ding, Yihui Zhang, Cecilia Laschi y Li Wen, quienes reconocieron que existen varios desafíos importantes para implementar un sistema robótico integrado de este tipo.
Primero, lograr un movimiento efectivo de propagación de curvatura es esencial, pues el brazo del pulpo tiene un número infinito de grados de libertad, por lo que controlar un sistema tan redundante es una tarea extremadamente difícil.
Los científicos reconocieron que debido a esta complejidad, no han logrado "resultados experimentales convincentes" al imitar la curvatura de un pulpo, pues aún son "ineficaces" para controlar el brazo robótico blando, según la revista Science.
Otro reto para la consolidación de este proyecto es la integración de múltiples componentes sensoriales de procesamiento de señales y de comunicación para interactuar con el mundo exterior. En este sentido, la tecnología existente actualmente representa un limitante, pues hasta la fecha, no existían robots con circuitos internos extensibles y con alta capacidad de deformación.
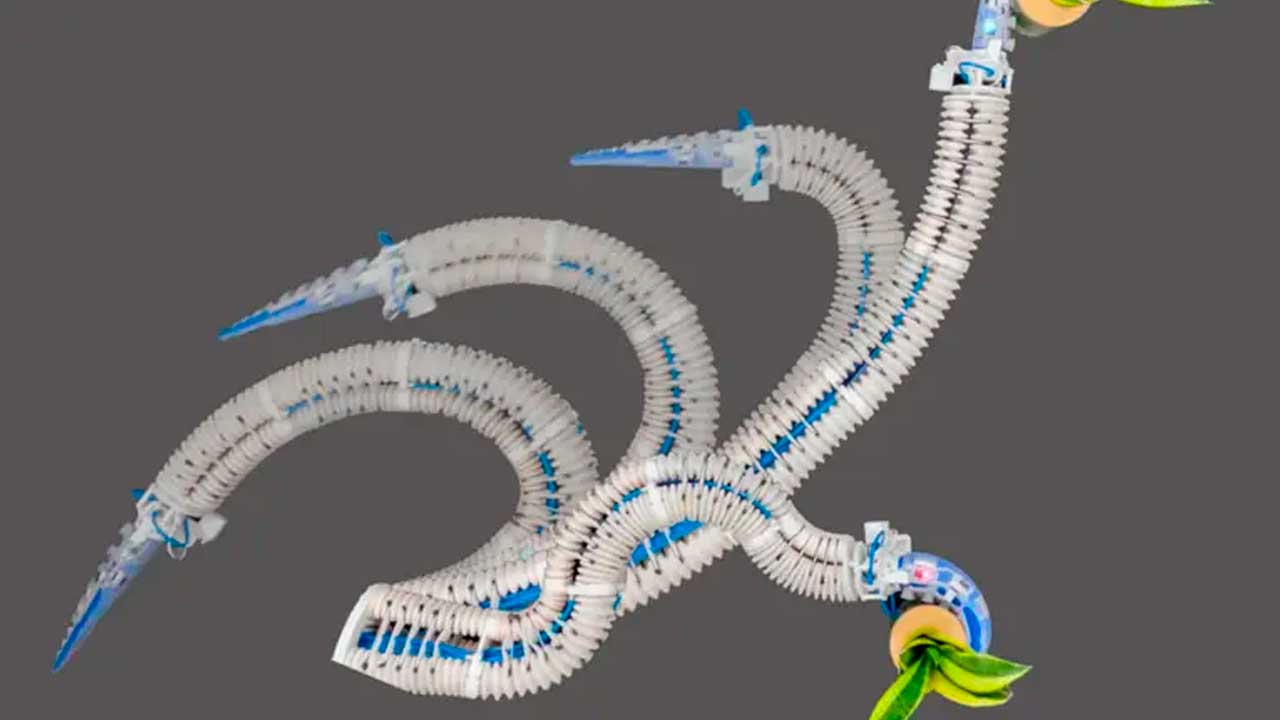
Para eliminar las limitaciones tecnológicas, los científicos combinaron una red de detección y procesamiento para crear un "brazo de pulpo blando con electrónica integrada" (E-SOAM, por sus siglas en inglés). Este brazo es capaz de accionarse neumáticamente y está compuesto por cinco segmentos, además de una parte distal que desempeña el papel de una pinza con terminal, que además cuenta con una red electrónica integrada.
Además, la pinza terminal cuenta con una red de metal líquido que "imita" la funcionalidad del nervio de un pulpo, y que permite el procesamiento sensorial de flexión y succión "en estados altamente deformables".
Con un cuerpo delgado y cónico, E-SOAM también utiliza la estrategia de propagación de curvatura de un pulpo para alcanzar su objetivo.
Gracias al circuito extensible, fabricado a base de metal líquido, el robot es capaz de controlarse bidireccionalmente con un guante portátil.
Los investigadores realizaron múltiples pruebas que resultaron exitosas en cuestiones de agarre y extensión.
En conclusión, los investigadores señalaron como "satisfactorios" los resultados alcanzados gracias a las innovaciones tecnológicas realizadas para desarrollar el brazo de pulpo.
Con información de: nmas.com.mx
CD/NR

Notas del día:




Jul 26, 2024 / 18:05
Hoy inician las actividades del TUMIN en Papantla
Jul 26, 2024 / 17:04
Egresan nuevos oficiales de la Armada en Veracruz; gobernador Cuitláhuac se une a reconocimiento
Jul 26, 2024 / 16:30
El Gobierno de Tuxpan fomenta emprendimientos y el autoempleo
Jul 26, 2024 / 16:08
Demanda justicia tras 8 meses del asesinato de su esposo 📹
Jul 26, 2024 / 16:08
"Feminismos en la Infancia" en la UPAV
Jul 26, 2024 / 15:57
8va. Reunión de la Red Jurisdiccional de Salud en San Andrés Tuxtla
Jul 26, 2024 / 15:51
OPLE Veracruz colaborara con “Enseñas para la Inclusión”
Jul 26, 2024 / 15:22
Lady Gaga cantó en francés en la inauguración de Juegos de París
Jul 26, 2024 / 15:19
Matan a líder del Partido Sinaloense y próximo diputado federal
Jul 26, 2024 / 14:56
México aparece en Inauguración de los Juegos en París
Jul 26, 2024 / 14:53
Jul 26, 2024 / 14:47
Álvarez Vera, madrina de generación de la "Benigno D. Nogueira"